Today I took my robot to my test area. I collected two battery packs worth of data. I am now begging the long process of analyzing 15 megabytes of binary log files. Oh Joy! No sarcasm here. I love data.
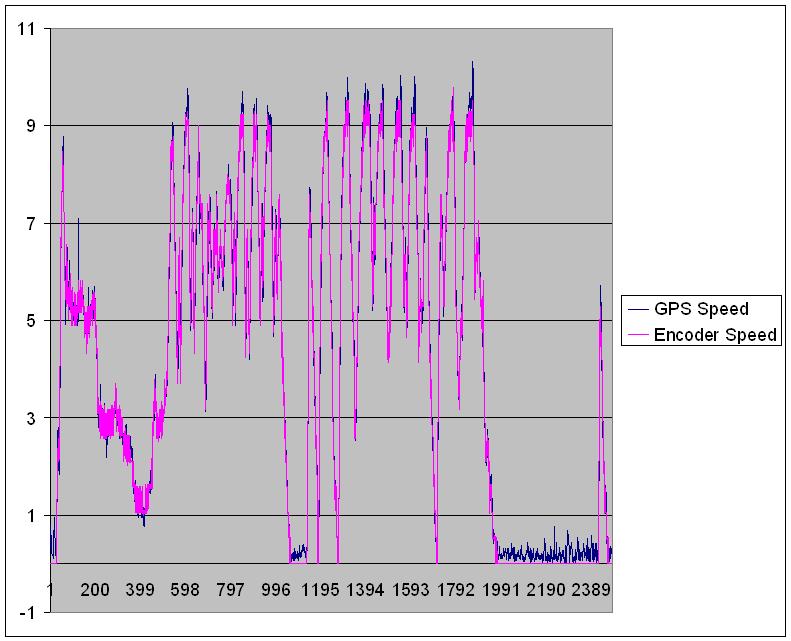
So the first thing I did was to take one run of 2400 samples and plot the speed provided by the GPS and that I compute from the encoder. Here I was a bit worried that I got all the math right with gear ratios and wheel diameters. But as you can see, I was pretty much spot on.
One thing to notice is that the encoder speed is actually much more accurate at slow speeds and particularly at a dead stop. The GPS is never content to say it is not moving but the encoder is.
More data later!