Towards my goal of entering the AVC competition in 2014, I have been evaluating GPS units. The current model I am looking at is a u-Blox LEA-6H with a patch antenna. The first test I tried was to hold the GPS stationary and record data for 30 minutes. I recorded the North and East position and started analyzing it. What I found, I do not like.The first thing I did was to plot the changes in North and East from the average. This is the wander plot:

At first glance, this looks ugly in that there is up to nearly 8 meters (24 feet) of variation. But before panicking, perhaps the variation is over a long time. If the variation would stay within a meter over the 90 seconds it takes to make a single run at AVC, the long term wander would be meaningless.
So the next thing was to plot the difference in the X position at each sample, and the X position 90 seconds ago. I also did the same for the Y coordinate. This would give me an idea how much variation I would see from the start to the end of a run. Here is the data:
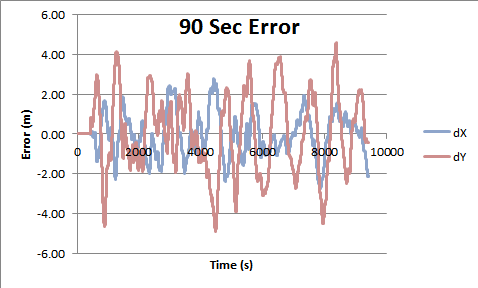
So now it IS time to PANIC. In as little as a 90 second period I can still expect to see +- 4 meters of wander. Some points on the AVC course are not that wide!
So GPS is good for very long term position solutions, affordable IMUs are good for very short time durations (~15 seconds), what is good for the middle ground?
This looks like it is pointing me to a sensor fusion solution. Can I merge GPS, and IMU, wheel encoders, and possibly my SUNDAR into a good position?